深圳供应AGV智能运输车型号

————认证资质————
- 个人未认证
- 企业已认证
- 微信未认证
- 手机已认证
该用户其他信息
———线上沟通
与商家沟通核实商家资质
线下服务
核实商家身份所有交流确保留有证据
服务售后
有保障期的服务请与商家确定保障实效
详情
深圳供应AGV智能运输车型号
日本在1963年首次引进AGV,其第一家AGV工厂于1966年由一家运输设备供应厂商与美国的Webb公司合资建成。1976年后,日本对AGV的发展给予了高度重视,每年增加数十套AGV系统,有神钢电机、平田电机、住友重机等27个主要生产厂商生产几十种不同类型的AGV。1981年,日本的AGV总产值为60亿日元,1985年已上升到200亿日元,平均每年以20%的速度递增,1986年,日本累计安装了2312个AGVS,拥有5032台AGV,到1990年日本拥有AGV约一万台。到1988年,日本AGV制造厂已达47家,如大福,Fanuc公司、Murata(村田)公司等,广泛应用于汽车制造、机械、电子、钢铁、化工、医药、印刷、仓储、运输业和商业上。
我国AGV发展历程较短,但一直以来不断加大在这一领域的投入,以改变我国AGV长期依赖进口的局面。经过不懈地努力终于取得了一定的成效,北京起重运输机械研究所、清华大学、中国邮政科学院邮政科学研究规划院、中国科学院沈阳自动化所、大连组合机床研究所、国防科技大学和华东工学院都在进行不同类型的AGV的研制并小批投入生产。
1991年起,中科院沈阳自动化研究所/新松机器人自动化股份研究公司为沈阳金杯汽车厂研制生产了客车6台AGV用于汽车装配线中,可以说是汽车工业中用得比较成功的例子,并于1996年获国家科学技术进步三等奖。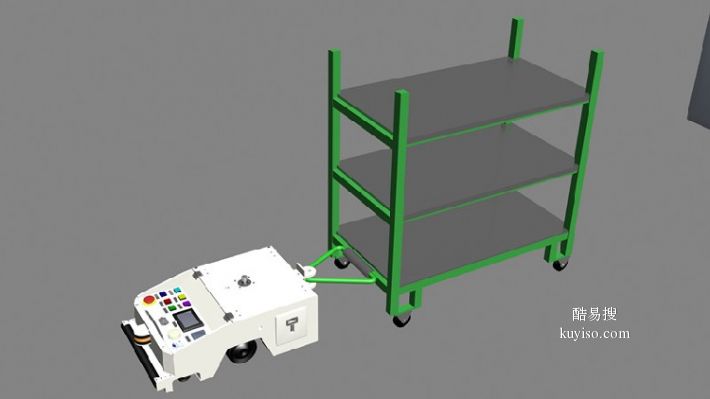
AGV自动导引小车的引导原理是根据自动导引小车行走的轨迹进行编程,数字编码器检测出的电压信号判断其与预先编程的轨迹的位置偏差,控制器根据位置偏差调整电机转速对偏差进行纠正,从而使自动导引小车沿预先编程的轨迹行走。因此AGV自动导引小车行走过程中,需不断地根据输入的位置偏差信号调整电机转速,对系统进行实时控制。
小车采用两后轮独立驱动差速转向,两前轮为万向轮的四轮结构形式。步进电机经减速器后通过驱动轮提供驱动力,当两轮运动速度不同时就可以实现差速转向。
车轮采用实心橡胶轮胎。车体后面两主动轮为固定式驱动轮,与轮毂式电机相连。前面两个随动轮为旋转式随动轮,起支承和平衡小车的作用。
AGV即:AutomatedGuidedVehicle简称AGV,当前最常见的应用如:AGV搬运机器人或AGV小车,主要功用集中在自动物流搬转运,AGV搬运机器人是通过特殊地标导航自动将物品运输至指定地点,最常见的引导方式为磁条引导,激光引导,RFID引导等。磁条引导的方式是常用也是成本最低的方式,但是站点设置有一定的局限性以及对场地装修风格有一定影响;激光引导成本最高对场地要求也比较高所以一般不采用;RFID引导成本适中,其优点是引导精度高,站点设置更方便可满足最复杂的站点布局,对场所整体装修环境无影响,其次RFID高安全性稳定性也是磁条导航和激光导航方式不具备的。
电磁感应式:也就是我们最常见的磁条导航,通过在地面黏贴磁性胶带,AGV自动搬运车经过时车底部装有电磁传感器会感应到地面磁条地标从而实现自动行驶运输货物,站点定义则依靠磁条极性的不同排列组合设置。
较小的场地要求--AGV比传统的叉车需要的巷道宽度窄得多。同时,对于自由行驶的AGV而言,还能够从传送带和其他移动设备上准确地装卸货物;
灵活性--AGV系统允许最大限度地更改路径规划;
调度能力--由于AGV系统的可靠性,使得AGV系统具有非常优化的调度能力;
工艺流程--AGV系统应该也必须是工艺流程中的一部分,它是把众多工艺连接在一起的纽带;
长距离运输--AGV系统能够有效地进行点对点运输,尤其适用于长距离运输(大于60米);
特殊工作环境--专用系统可在人员不便进入的环境下工作。
2)确认收货前请仔细核验产品质量,避免出现以次充好的情况。
3)该信息由酷易搜网用户自行发布,其真实性及合法性由发布人负责,酷易搜网仅引用以供用户参考,详情请阅读酷易搜网免责条款。查看详情>
 渝公网安备 50019002501864号
联系电话:023-63022733 联系邮箱:kuyisokefu@163.com
渝公网安备 50019002501864号
联系电话:023-63022733 联系邮箱:kuyisokefu@163.com互联网药品信息服务资格证